 Final Project
Description
Final Project
Description
COM S 576
FINAL PROJECT: A ROBOT MOVING IN 3D SPACE
JOHN KIHONGE
SPRING 2000
This is the final Com S 576 Project homepage. The final project is a path planning project done for a 3D world which has a 3D robot and 3D obstacles. The task is to move the robot in a continuous, collision-free motion in the space. The robot moves in an XZ-plane and is able to go around obstacles and still stay inside the outer boundary (walls).
The project is defined at this link:
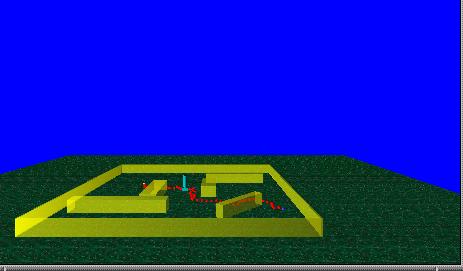
The following images show the robot at different positions, between the initial position and the final position, for one of the paths that was generated. As it can be seen in the diagram, the robot is able to move around the objects. The path is marked with red dots on the surface.
The following shows the robot at different positions:

Robot at Initial position
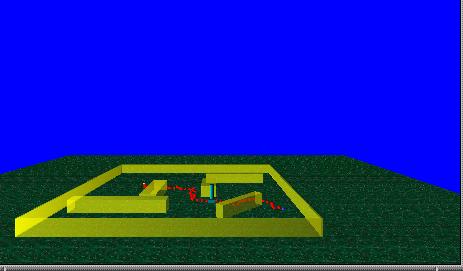

Robot near the Goal position
The above images are from the frames of the movie of the robot moving along the path.
Here is a link to a movie for the motion of the robot
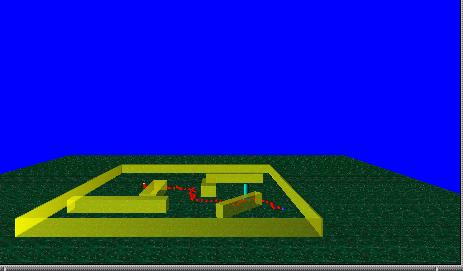
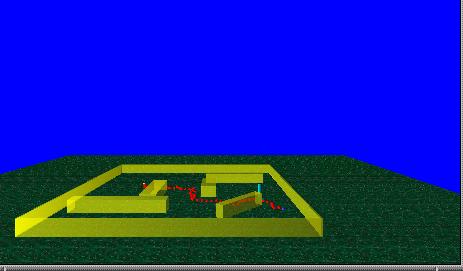
As indicated in the project description, the algorithm sometimes failed to get a complete path from the initial position to the final (goal) position:
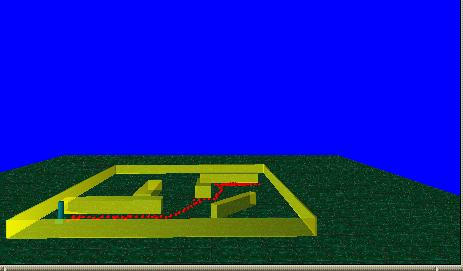
As can be seen above, the path points (red dots) are concentarted on the side facing us of the far-right obstacles. The path does not actually go past the obstacles to where the goal position is located. May be if the number of iterations are increased, the path may eventually go past the obstacle, but that would be an inefficient solution.
The Source Code files are:
